梯度下降法及牛顿法详解
梯度下降法
对于函数$f:R^n\rightarrow R$,输入为$\vec x = (x_1, x_2, x_3, \dots,x_n)^T$
梯度
定义函数的梯度为:
方向导数
方向导数:一个标量场在某点沿着某个向量方向上的方向导数,描绘了该点附近标量场沿着该向量方向变动时的瞬时变化率。
沿着方向$\vec u$的方向导数表示在$\vec x$处,沿着方向$\vec u$,函数的增长率,定义为:
梯度为一个矢量,方向导数为一个标量
梯度下降法
为了最小化$f$,则需要寻找一个方向$\vec u$,沿着该方向,函数减少的速度最快,即:
即:
设$\vec u$与梯度的夹角为$\theta$,则所求的$\theta$为:
又因为$||\vec u||_2=1$,且夹角$\theta$与梯度的模长无关
则当$\theta=π$时,即当$\vec u$为沿着梯度的反方向时,函数值减小的速率最快。
梯度下降求解过程: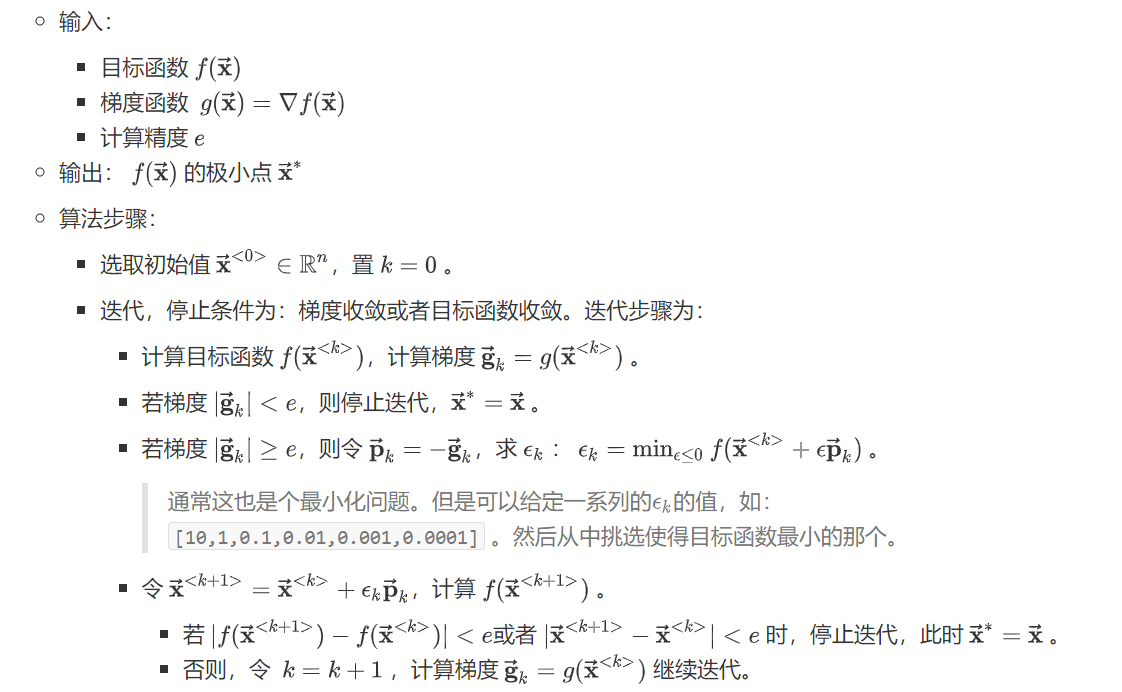
学习率的选择方法:
- 选择一个小的正常数
- 线性搜索,给定一个学习率集合,每次迭代选择使得目标函数下降最大的学习率
- 最速下降法。
当目标函数为凸函数时,梯度下降法的解为全局最优解
牛顿法
海森矩阵
当函数的输入为多维时,定义海森矩阵: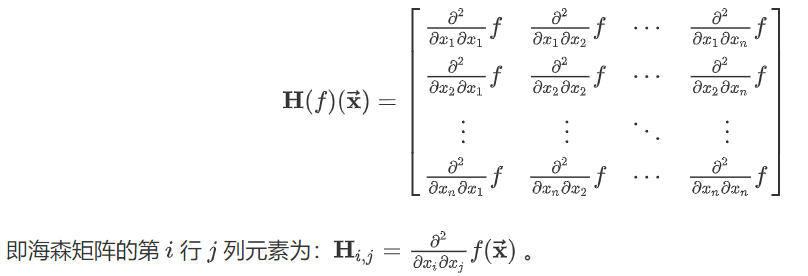
观察矩阵结构可以看出,当函数的二阶偏导数连续时,海森矩阵是对称的。
梯度下降法的缺点
将$f(\vec x)$在$x_0$出泰勒展开:
其中$\vec g$为$\vec x_0$处的梯度,$H$为$\vec x_0$处的海森矩阵。
根据梯度下降法:$\vec{ \mathbf { x } } ^ { k+1 } = \vec{ \mathbf { x } }^{k} - \epsilon \vec g$
根据泰勒公式:
观察上式,若$\frac { 1 } { 2 } \epsilon ^ { 2 } \vec{ \mathbf { g } } ^ { T } \mathbf { H } \vec{ \mathrm { g } }$很大时,$f ( \vec { \mathbf { x } }^{ K+1 } ) > f ( \vec { \mathbf { x } }^{ K } )$,此时沿着负梯度,函数值反而在增大,则:
- 如果 $\epsilon ^ { 2 } \vec{ \mathbf { g } } ^ { T } \mathbf { H } \vec{ \mathrm { g } } < 0$,则无论$\epsilon$取多大的值,函数值都是持续减小的
- 如果 $\epsilon ^ { 2 } \vec{ \mathbf { g } } ^ { T } \mathbf { H } \vec{ \mathrm { g } } > 0$,则只有当$\epsilon$很小时,函数值才会持续减小。
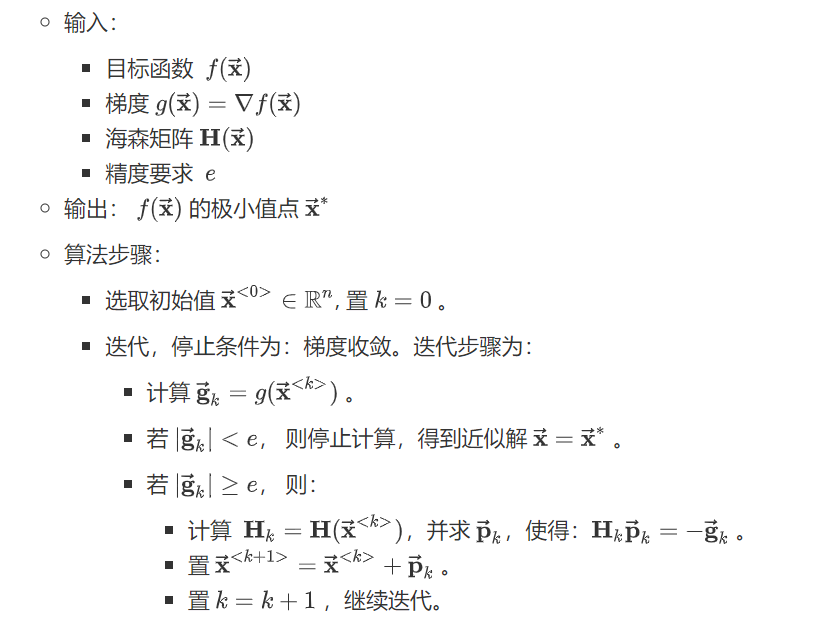
牛顿法
牛顿法就是在梯度下降中加入和目标函数二阶导数的信息。
设$\vec x$第k次的迭代值为$\vec x ^ { k }$,第k+1次的迭代值为$\vec x^{ k+1 }$同样对目标函数在$\vec x_k$泰勒展开:
当$\vec x$为极值,则满足$\frac{\partial f(\vec x)}{\partial \vec x}=\vec 0$,若经过k+1次迭代后求得极值,则满足$\frac{\partial f(\vec x^{,k+1})}{\partial \vec x^{k+1}}=\vec 0$,带入上式有:
最后求得:
牛顿法迭代过程
牛顿法的缺点:
- 计算海森矩阵的逆开销较大
- 当位于鞍点附近时,牛顿法效果很差,因为牛顿法会主动跳入鞍点。
拟牛顿法
在牛顿法的迭代中,需要计算海森矩阵的逆矩阵$H^{-1}$,这一计算比较复杂。可以考虑用一个矩阵$G$来代替海森矩阵的逆矩阵。
矩阵$G$需要满足的条件:
- 正定
- 满足拟牛顿条件
$\lfet( \vec g{k+1} - \vec g{k} \right) = H_k \cdot \left(\vec x^{ k+1 }-\vec x^{ k }\right)$
常见的逆牛顿算法
- DFP算法
- BFGS算法
- Broyden类算法
参考:
《统计学习方法》